


- Electro- and Magneto-Responsive Soft Actuators Based on NdFeB-PDMS Composite-Patterned Ionic Polymer Membranes
Damin Won*, Jaehwan Kim*†
* School of Mechanical Engineering, Kumoh National Institute of Technology
- NdFeB-PDMS 복합재가 패턴된 이온성 고분자 박막 기반 전기-자기 응답형 소프트 액추에이터
원다민* · 김재환*†
This article is an open access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
In this study, a soft actuator that responds to both electric and magnetic stimuli was fabricated This was achieved by laser strip-patterning an NdFeB-PDMS composite (1–3 mm pitch), embedding the patterned strips in a Nafion ionic polymer matrix, and subsequently coating both sides with PEDOT:PSS electrodes. The specimen with a 3 mm pitch exhibited an average peak-to-peak displacement of 1.60 mm under a ±1 V, 0.1 Hz sinusoidal input, while a standalone permanent magnet located 20 mm away (≈ 30 mT) induced an immediate 2 mm bend. Sequential application of electro-magnetic actuation enabled the on-demand reversal of the bending direction. When the strip orientation was set to 45°, a torsional component was introduced, yielding programmable two-degrees-of-freedom motion. These findings demonstrate that large, reversible deformation can be achieved under low-voltage (≤ 1 V) and low-magnetic-field (≤ 30 mT) conditions. Consequently, the proposed electro-magnetic hybrid design presents a promising actuation platform for next-generation bio-inspired robots, active photonic components, and wearable haptic devices.
NdFeB-PDMS 복합재를 레이저로 스트립(1–3 mm) 형상 패터닝한 뒤 Nafion 이온성 고분자에 매립하고, PEDOT:PSS 전극을 양면 도포하여 전기·자기 응답형 소프트 액추에이터를 제작하였다. 3 mm 피치 시편은 ±1 V, 0.1 Hz 입력에서 평균 1.60 mm의 peak-to-peak 변위를 보였으며, 20 mm 떨어진 30 mT 영구자석만으로도 약 2 mm 즉각 굽힘이 발생하였다. 전기·자기 자극을 순차 인가하면 소프트 액추에이터의 굽힘 방향을 즉시 반전할 수 있었고, 스트립 배향각을 45°로 설정하면 비틀림이 더해져 2자유도 모션이 구현되었다. 1 V 이하·30 mT 이하의 저전압·저자기장 조건에서 큰 변위와 방향성 제어가 가능함을 확인하여, 제안된 구조가 생체 모사 로봇, 능동 광학, 웨어러블 촉각 장치용 전기·자기 하이브리드 구동 플랫폼으로 유용함을 제시한다.
Keywords: 전기활성(Electroactive), 자기활성(Magnetoactive), 소프트 액추에이터(Soft actuator), 복합재(Composites), 레이저 패터닝(Laser patterning)
최근 전기활성 (Electroactive) 이온성 소프트 액추에이터는 유연성, 저전력 구동, 저전압 하 대변형, 생체 적합 기능화 등의 장점으로 의료 로보틱스, 웨어러블 기기, 휴먼-머신 인터페이스 분야에서 많은 주목을 받고 있다[1-3]. 이 액추에이터는 고분자 전해질막 내부의 이온 이동이나 이온 주입에 의해 발생하는 부피 팽창, 수축을 이용하여 굽힘 거동을 한다[4-6]. 단일 전기자극에만 의존할 경우, 최대 변위와 응답 속도의 트레이드-오프 (trade-off), 구동 전극의 낮은 장기 안정성, 고습·수중·장거리 운용 등의 극한 환경에서의 구동 성능 저하와 같은 근본적인 한계가 존재한다.
이러한 한계를 극복하는 방법으로 이중(전기·자기) 자극 기반 복합 액추에이터가 제시되고 있다[7,8]. 전기 자극은 저전력·고정밀 미세 제어를, 자기 자극은 원격·즉각적 구동과 큰 구동력을 각각 제공하므로, 두 물리 자극을 상호 보완적으로 결합하면 단일 자극 시스템 대비 더 넓은 동작 범위와 신속한 응답성을 동시에 확보할 수 있다. 특히 네오디뮴-철-붕소(NdFeB) 미세 자석 분말은 높은 잔류 자화, 뛰어난 자화 유지력 및 코팅을 통한 우수한 환경 안정성 덕분에 자성 충진재로 이상적이다[9-11]. 그 예로, 미세 분말을 탄성 고분자 매트릭스에 균질 분산시키면 고분자 및 이로 이루어진 액추에이터 내부에 영구적 자기 모멘트를 간단히 도입할 수 있다는 장점이 있다.
따라서 본 연구에서는 NdFeB를 PDMS에 충진한 후, 이 복합재를 레이저 패터닝하여 스트립 단위로 기하학적 배열을 부여함으로써, 높은 분말 함량 없이도 자기 토크를 효율적으로 국소 집중시키고 전기-자기 하이브리드 구동 특성을 극대화하고자 한다. 이 구조는 스트립 간격 (Pitch) 및 배향 각도를 설계 변수로 활용해 굽힘의 크기와 방향을 프로그래밍할 수 있고, 1 V 이내의 저전압에서도 전기 구동 변위가 확보되며, 약한 외부 자계만으로도 즉각적인 원격 굽힘을 달성할 수 있다. 이를 통해 기존 방식의 한계를 보완하면서도 제작 공정의 단순성과 기계적 유연성을 저해하지 않는 새로운 설계 전략을 제시하고 있다. 이러한 특성은 차세대 생체 모사 소프트 로봇, 능동 광학 소자, 웨어러블 촉각 피드백 장치 등 광범위한 응용 분야에서 전기-자기 하이브리드 구동의 실용적 가능성을 크게 확장할 수 있을 것이다.
2.1 재료 및 기기
연구에서는 PDMS (Sylgard 184 a/b, Dow corning), NdFeB 미세 분말 (5 μm, Henan Keer Metallurgy Material Co., Ltd), Nafion solution (D2021, DuPontTM), EMIM-BF4 (>99%, IoLiTec), N,N-Dimethylacetamide anhydrous (DMAc, 99.8%, Sigma-Aldrich), Dimethyl Sulfoxide (DMSO, Sigma-Aldrich), PEDOT:PSS (Clevios PH1000, Heraeus Epurio)는 별도의 처리없이 그대로 사용하였다. 레이저 패터닝을 위한 장비로는 C30 (코리아트 정밀기계)를 활용하였으며, 자속 밀도 측정을 위하여 가우스미터(KANETEC)를 활용하였다. 전기적 액추에이터는 NI-PXI 1042Q 및 PXI-6070E 보드를 활용하여 구동 되었으며, 변위 측정을 위하여 레이저 변위 센서인 LK-H080와 LK-G5001V (Keyence)가 활용되었다.
2.2 NdFeB-PDMS 복합재 필름
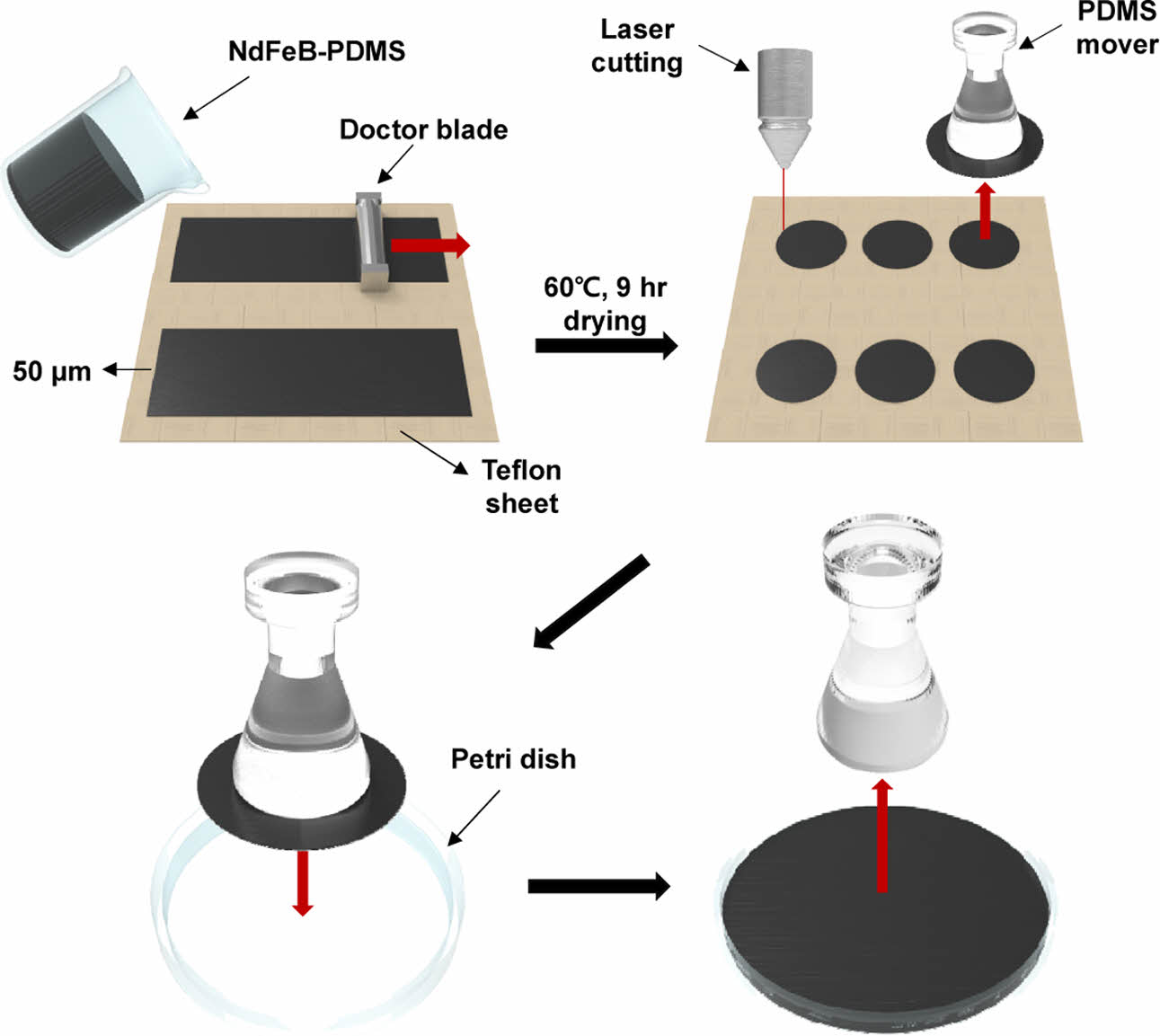
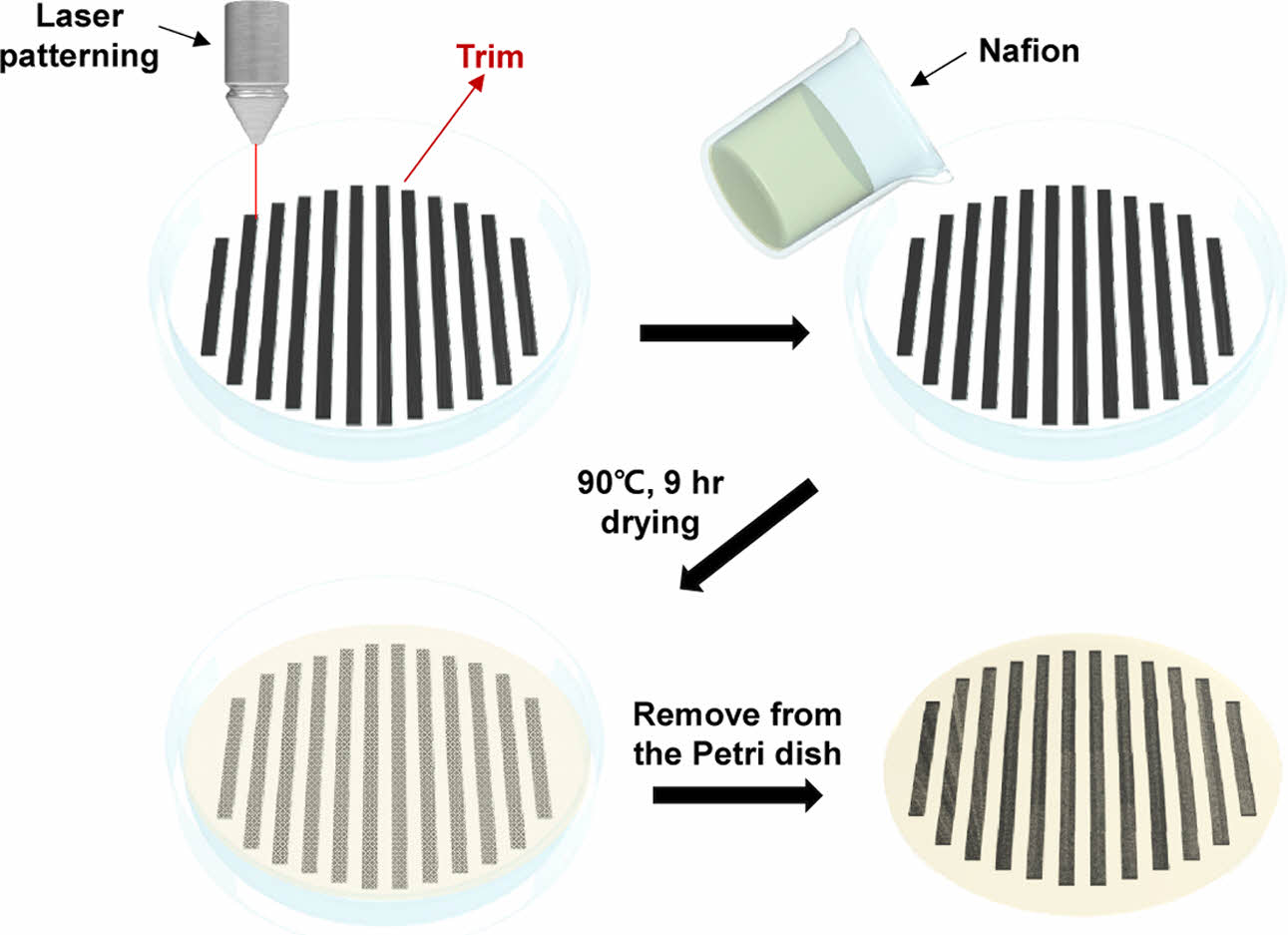
Fig. 1은 NdFeB 미세 분말을 포함하는 PDMS 슬러리를 이용하여 자성 필름을 제조하는 전체 공정을 네 단계로 도시하고 있다. 먼저 PDMS는 10:1 비율로 주제와 경화제를 섞어 준비시켜 놓는다. NdFeB 미세 분말을 상기 PDMS에 30 wt%로 섞고 난 후, Teflon 시트지 위에 복합 용액을 붓는다. Teflon 시트지는 NdFeB-PDMS 복합재 필름의 탈착을 용이하게 하기 위하여 사용되었다. 그 후, 닥터블레이드 기법을 활용하여 Teflon 시트지 위에 NdFeB-PDMS 복합재를 약 50 μm의 두께로 균일한 코팅 막을 형성한다. 단순 NdFeB-PDMS 복합 용액의 캐스팅은 반복 실험 시 균일한 두께 제어가 쉽지 않기에 본 연구에서는 균일한 두께를 갖도록 닥터블레이드 기법을 활용하였다. 두 번째 단계에서는 60°C에서 9 시간 열경화를 마친 NdFeB-PDMS 복합재 필름을 CO2 레이저를 이용하여 원형 디스크 형태로 절단한 뒤, PDMS 스탬프를 이용해 Teflon 시트지에서 들어 올린다. 그 후, 원형의 NdFeB-PDMS 복합재 필름을 Petri dish에 잘 밀착하고 정렬시킴으로써 후속 공정의 적용성을 높였다.
2.3 NdFeB-PDMS 복합재가 패턴된 이온성 고분자
Fig. 2는 Fig. 1에서 제조한 NdFeB-PDMS 복합재 필름을 레이저를 활용하여 스트립 형상으로 패터닝하고 Nafion 매트릭스에 매립해 복합막을 완성하는 과정을 보여 준다. 먼저 CO2 레이저가 Petri dish 내부에 밀착된 NdFeB-PDMS 복합재 필름의 표면을 패터닝하여 잘려진 부분을 트리밍함으로써 폭 2 mm, 피치 1~3 mm의 NdFeB-PDMS 스트립을 얻는다. 그 후, 이온성 고분자를 제작하기 위하여 이온성 액체가 60 wt% 함유된 Nafion 용액을 준비한다. 여기서 Nafion은 DMAc에 잘 분산하여 준비한다. 제작된 Nafion-이온성 액체 용액을 NdFeB-PDMS 스트립이 있는 Petri dish에 부어주면, Nafion-이온성 액체 용액이 모세관 현상을 통해 스트립 사이 및 스트립-Petri dish 간극을 빠르게 충전한다. 그 후, 90 °C에서 수 시간 동안 빠르게 용매를 증발시키면 투명한 Nafion-이온성 액체 고분자가 형성되면서 NdFeB-PDMS 스트립을 견고하게 고정한다. 완전 경화된 복합막은 Petri dish에서 쉽게 탈착되어 소프트 액추에이터 제작을 위한 전극 증착에 바로 사용 가능한 원형 시편이 된다.
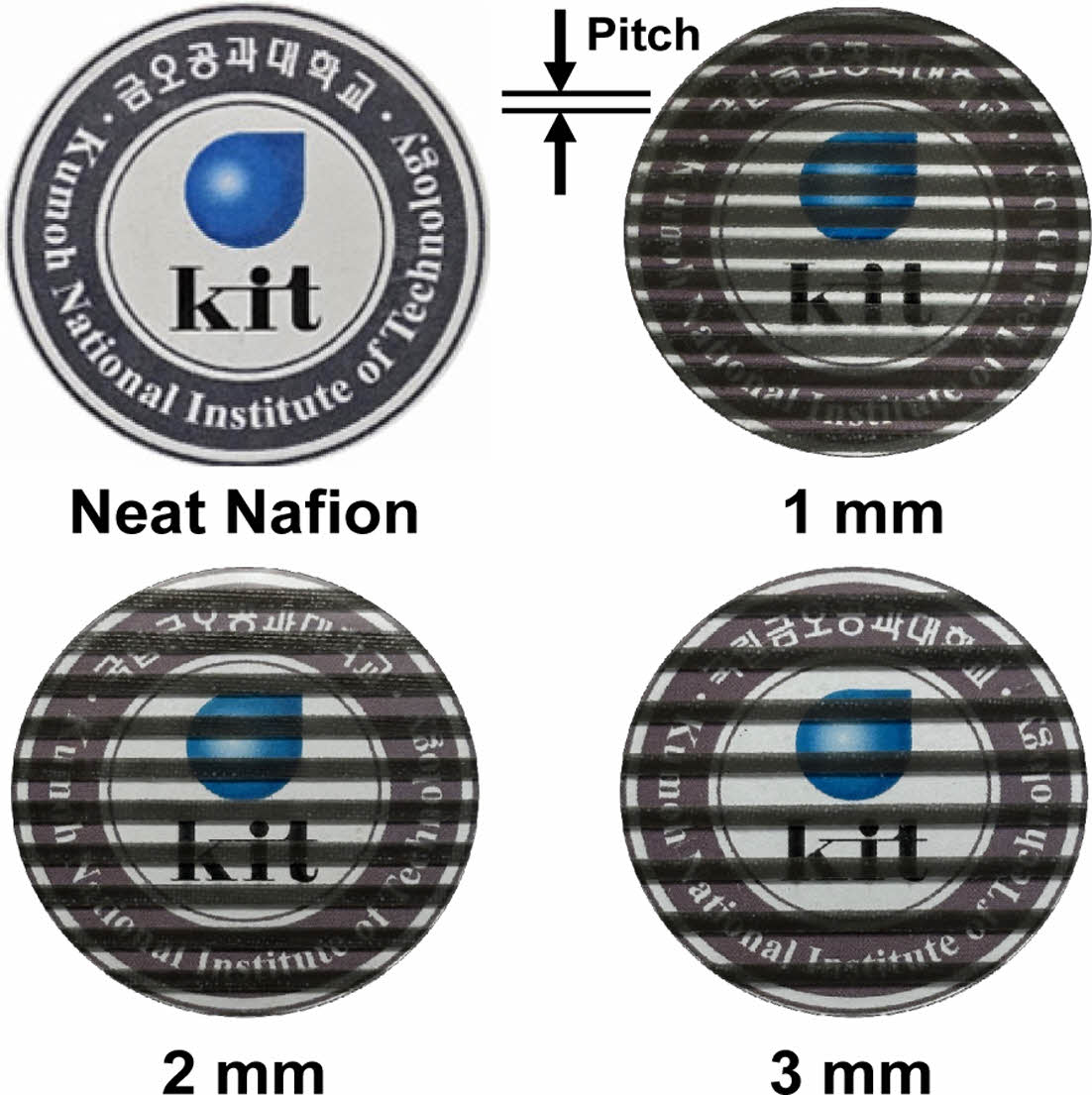
Fig. 3은 NdFeB-PDMS 스트립이 없는 무패턴 Nafion 박막과 서로 다른 피치(1, 2, 3 mm)를 갖는 NdFeB-PDMS/Nafion 복합막의 사진을 보여주고 있다. 네 장의 원형 시편은 모두 동일한 로고 위에 놓여 로고의 가독성을 통해 광 투과율을 직관적으로 확인할 수 있도록 배치되었다. 무패턴 Nafion은 거의 완전한 투명도를 보여 로고의 색상과 글자가 그대로 드러난다. 1 mm 피치 복합막에서는 NdFeB-PDMS 스트립이 촘촘히 배열되어 로고 배경이 어둡고 대비가 크게 낮아진다. 피치가 2 mm, 3 mm로 증가할수록 NdFeB-PDMS 스트립 면적 분율이 감소하여 로고가 점차 선명해지고 전반적인 투과율이 향상되었다. 또한 스트립이 일정 간격으로 균일하게 패터닝되어 있음을 한눈에 확인할 수 있어 제작 공정의 정밀성을 입증한다.
2.4 전기-자기 응답형 소프트 액추에이터
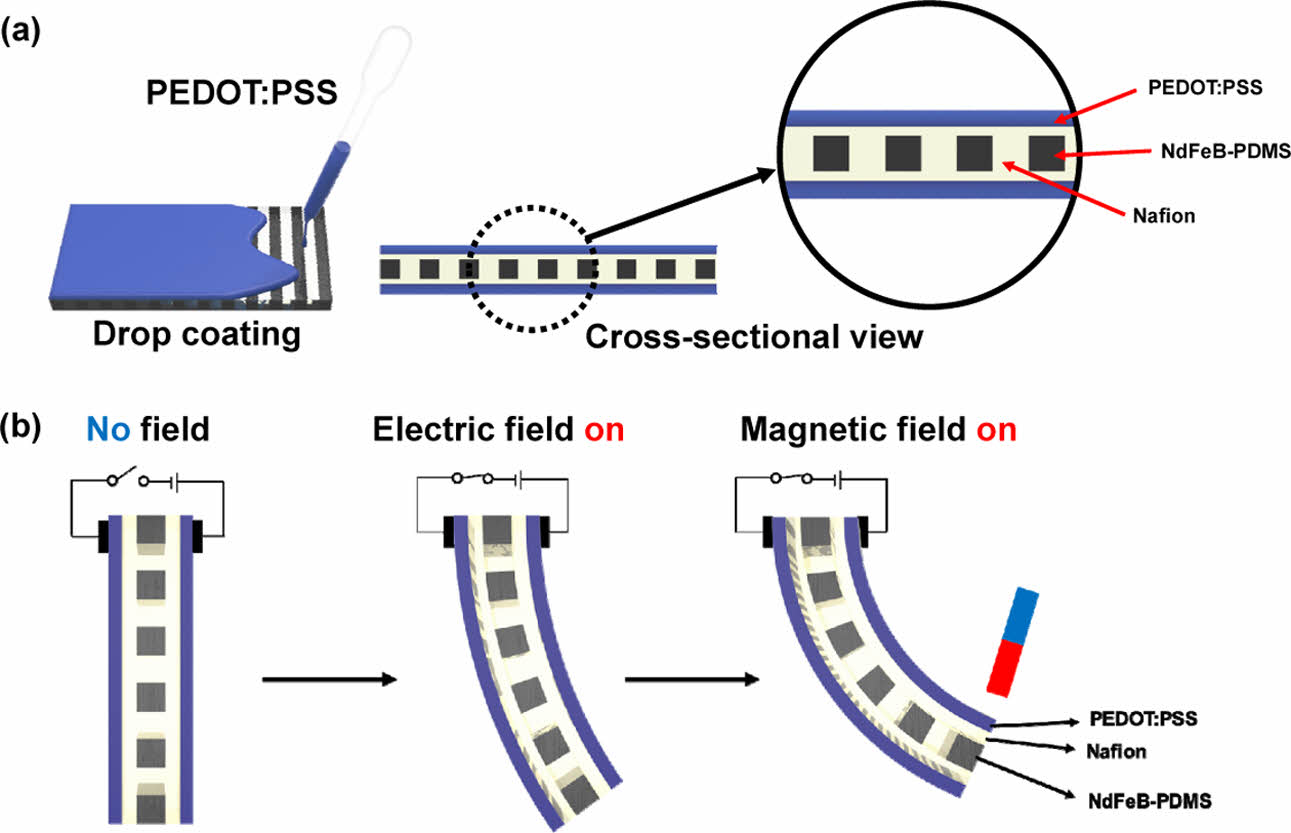
Fig. 4는 제작된 복합막 양면에 전도성 고분자인PEDOT:PSS 전극을 제작하는 방법과 전기·자기 이중 응답 작동 원리를 설명한다. Fig. 4(a)에서는 피펫을 이용해 복합막 양면에 PEDOT:PSS 용액을 도포하는 과정을 그림으로 나타냈으며, 확대된 단면에는 제작된 소프트액추에이터가 총 3개의 층으로 구성되어 있음을 보여주고 있다. 양쪽 끝 단에는 전극인 PEDOT:PSS가 형성되어 있으며, 중심부에는 NdFeB-PDMS 구조가 가운데에 위치하고 있는 이온성 고분자가 있는 형태이다. 여기서 PEDOT:PSS 전극은 DMSO 도핑을 통해 수 Ω의 낮은 표면 저항을 제공해 소프트 액추에이터의 구동 전압 손실을 최소화한다. Fig. 4(b)는 인가 자극에 따른 세 가지 상태를 묘사하고 있다: ‘No field’ 상태에서는 시편이 움직이지 않고, ‘Electric field on’ 상태에서는 양쪽 끝 단의 전극에 전위차를 만들어, 이온성 고분자 내 이온들의 이동으로 인하여 소프트 액추에이터가 한쪽으로 굽힘 운동을 한다. 이어서, ‘Magnetic field on’ 상태에서는 외부 자석이 이온성 고분자 내 NdFeB를 끌어당김으로써 인력을 발생시켜 추가 굽힘을 유도한다. 여기서 전기 자극은 ±1 V 이하의 저전압에서 동작하게 되고, 자계 자극은 약 10 mT에서 수 백 mT 범위에서 선택적으로 적용할 수 있다. 따라서 두 자극을 독립적 혹은 조합하여 사용함으로써 더 큰 굽힘 변위나 빠른 응답 속도를 달성할 수 있을 것이다.
|
Fig. 1 Fabrication procedures of NdFeB-PDMS composite films |
|
Fig. 2 NdFeB-PDMS composites-patterned ionic polymers |
|
Fig. 3 Optical images of NdFeB-PDMS/Nafion films |
|
Fig. 4 (a) Fabrication of electro- and magneto-responsive soft actuators and (b) their working principle |
3.1 소프트 액추에이터의 전기적 구동
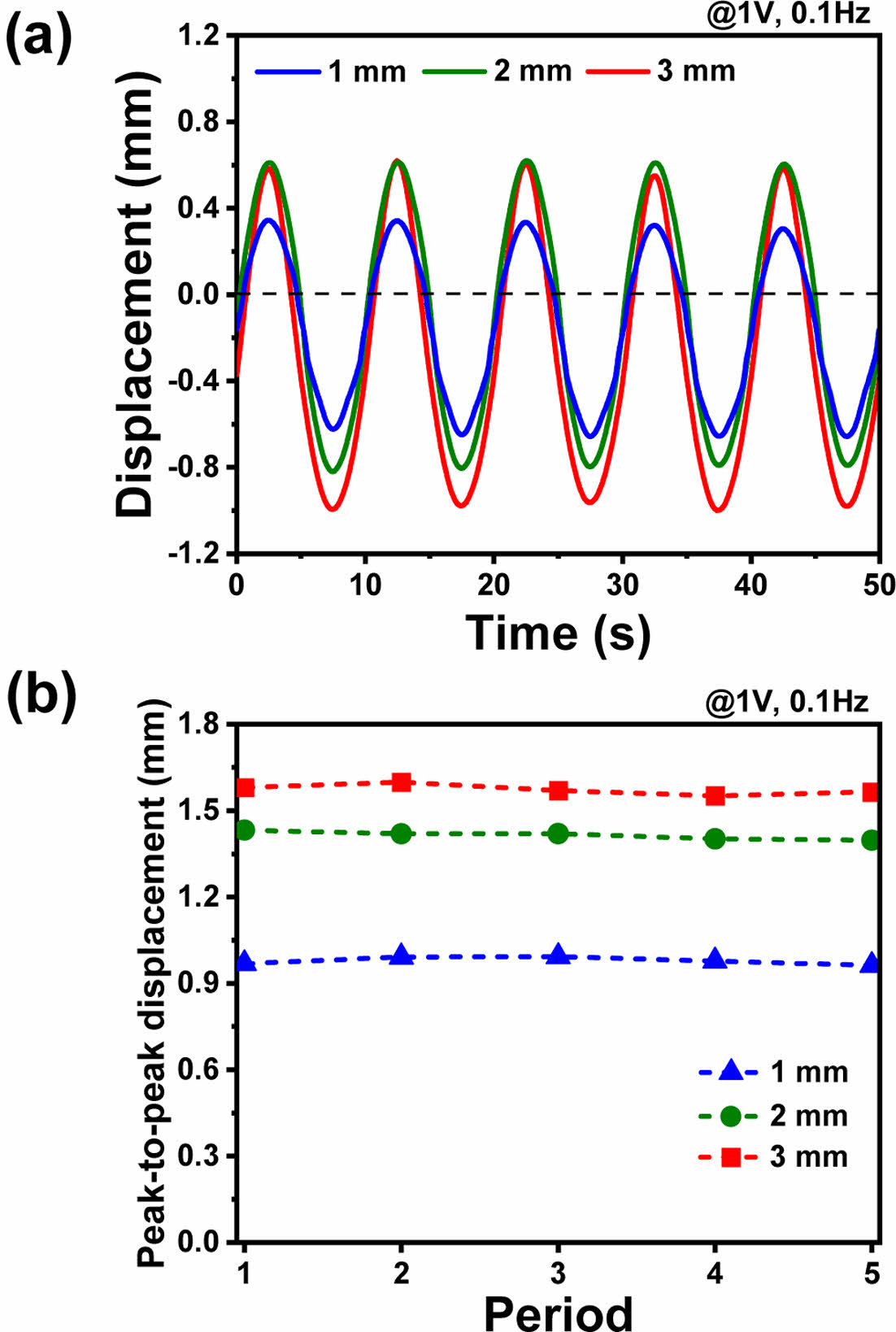
Fig. 5는 전기적 자극이 인가되었을 때, 서로 다른 NdFeB-PDMS 스트립 피치를 갖는 소프트 액추에이터의 구동 성능을 정량적으로 비교하고 있다. Fig. 5(a) 그래프에는 ±1 V, 0.1 Hz의 사인파를 인가했을 때 1 mm(파랑), 2 mm(초록), 3 mm(빨강) 피치를 갖는 소프트 액추에이터의 실시간 굽힘 변위가 50 초간 기록되어 있다. 제작된 모든 소프트 액추에이터는 변위의 크기 상 비대칭 거동을 하였는데, 이는 NdFeB-PDMS 스트립이 Nafion 내부에서 정중앙에 위치하지 않고 자중에 의해 제작 시 중심에서 벗어나게 위치하였기 때문임을 간접적으로 확인할 수 있다. 다만, 피치 간격에 따른 변위 크기의 경향성 및 위상 지연은 차이가 나지 않음을 확인할 수 있다. 실험 결과, 이온의 이동경로를 많이 막지 않는 3 mm 피치를 갖는 액추에이터가 가장 많이 움직였으며, 간격이 좁아질 수록 점차 그 변위의 크기가 작아졌다. 이 경향은 각 주기별 peak-to-peak 변위를 나타낸 Fig. 5(b)에서 확실히 확인할 수 있는데, 3 mm의 피치를 갖는 소프트 액추에이터는 평균 1.60 mm의 peak-to-peak 변위를 보이며, 2 mm와 1 mm 피치를 갖는 소프트 액추에이터들은 각각 1.39 mm, 0.97 mm로 약간 작은 진폭을 나타내고 있다. 전반적으로 피치가 좁을수록 소프트 액추에이터 내 NdFeB-PDMS 스트립의 유효 면적이 커지면서 AC 전압하에서의 이온 이동을 방해하여 동일 시간 대비 굽힘 변위가 작아지는 경향을 확인할 수 있다. 강성이 높은 내부 NdFeB-PDMS 구조가 이온성 고분자 내에 존재함으로 인하여 일반적인 Nafion 기반 액추에이터보다 절대적인 변위 값이 작게 나옴을 확인하였다.
3.2 소프트 액추에이터의 전자기적 복합 구동
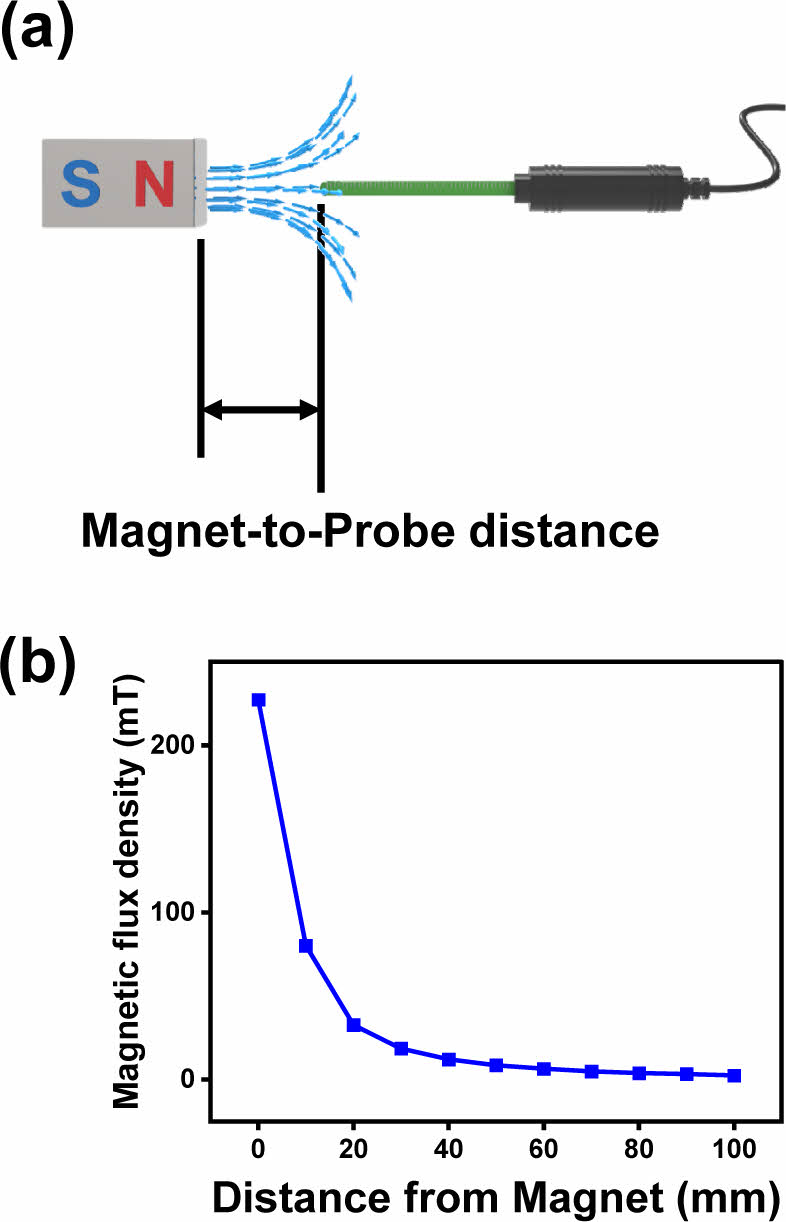
Fig. 6은 자기장 인가를 위하여 네오디뮴 자석을 활용했을 시, 자속 밀도가 거리에 따라 어떻게 정량적으로 나타나는지를 측정하기 위한 실험 셋업과 그 결과를 제시하고 있다. 상단 도식은 N35 등급 영구자석과 Hall-probe 가우스미터를 직선상에 정렬한 레이아웃을 보여 주며, 영구자석과 프로브의 거리를 정밀하게 제어하여 외부 인가 자속 밀도를 측정하였다. 하단 그래프는 자석 표면으로부터 0–100 mm까지 이동하며 측정한 자속 밀도를 나타낸 그래프로, 영구자석의 표면에서는 200 mT 이상의 강한 자속 밀도가 측정되지만, 10 mm의 거리에서는 약 80 mT, 50 mm 이상 떨어지면 10 mT 이하로 급격히 감소하는 지수적 감쇠 특성을 보이고 있다. 본 연구에서 실제 구동 실험에 사용된 자속 밀도 범위를 명시하고 필수적인 기준 정보를 제공하기 위하여 본 실험을 실시하였다.
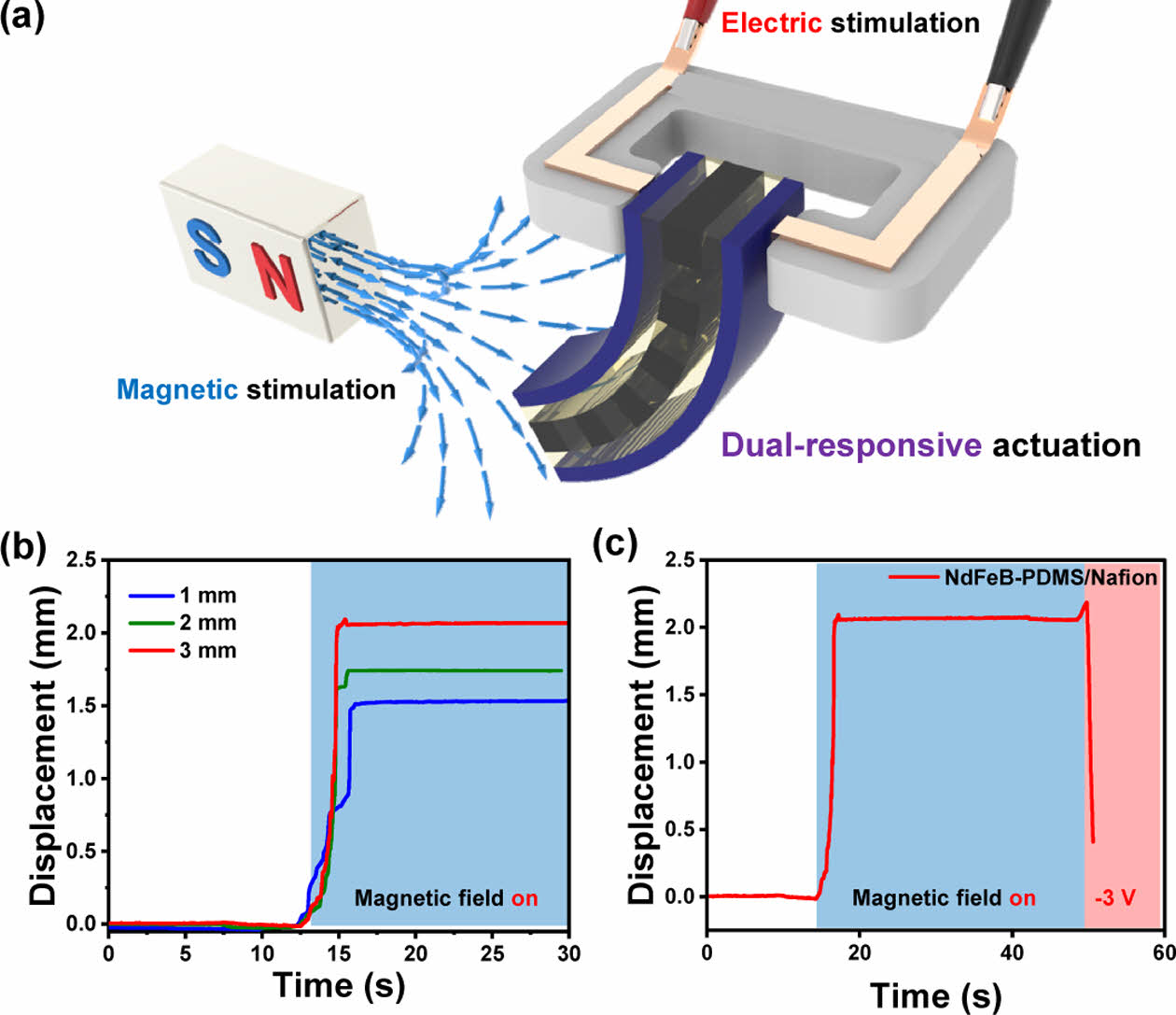
Fig. 7은 전기 및 자기 자극을 순차 인가했을 때 소프트 액추에이터가 보이는 이중 응답 거동을 실험적으로 입증하고 있다. Fig. 7(a)에는 본 실험을 위하여 활용한 실험 셋업을 도시하였다. 액추에이터의 양 끝 단에는 전기적 인가를 위한 도선이 연결되어 있으며, 영구자석은 정밀하게 거리를 제어하며 액추에이터에 영향을 주도록 하였다. Fig. 7(b) 그래프에는 자기장을 인가했을 시, 서로 다른 피치를 갖는 소프트 액추에이터의 시간-변위 곡선이 나타나있다. 12초에 영구자석을 각 액추에이터의 20 mm 거리에 두어 약 30 mT의 자속 밀도를 인가하자, 모든 시편이 즉각적으로 포화 변위에 도달하는 것을 볼 수 있다. 특이하게도 NdFeB 미세 분말이 상대적으로 많이 들어 있는 1 mm 피치의 액추에이터가 가장 잘 움직일 것으로 예상되었으나, 이온성 고분자의 강성 증가로 인한 변위 감소가 NdFeB 미세 분말의 양적 효과보다 더 큰 영향을 끼쳐 상대적으로 더 낮은 변위를 보이는 것을 확인하였다. 즉, 3 mm의 피치를 갖는 소프트 액추에이터가 자기장 인가 시에도 가장 높은 변위를 갖는 것을 확인하였다. Fig. 7(c)는 자기장 인가 후 전기장을 인가했을 때 3 mm의 피치를 갖는 소프트 액추에이터의 변위를 나타낸 그래프이다. 15초에 자기장을 인가하고 소프트 액추에이터가 약 2 mm의 정상 상태의 변위에 도달하게 되었을 때, 50초 시점에서 반대로 움직일 수 있도록 DC –3 V 전압을 추가로 인가하였다. 그 결과, 소프트 액추에이터가 전기장에 반응하여 반대 방향으로 움직이는 것이 확인된다. 이 결과는 NdFeB-PDMS 스트립이 제공하는 자기 토크와 Nafion-전극 시스템이 제공하는 이온 이동에 의한 구동이 독립적으로 잘 작동하여 우수한 전기-자기 굽힘 거동이 구현됨을 의미한다.
3.3 NdFeB-PDMS 스트립 배향 방향에 따른 구동
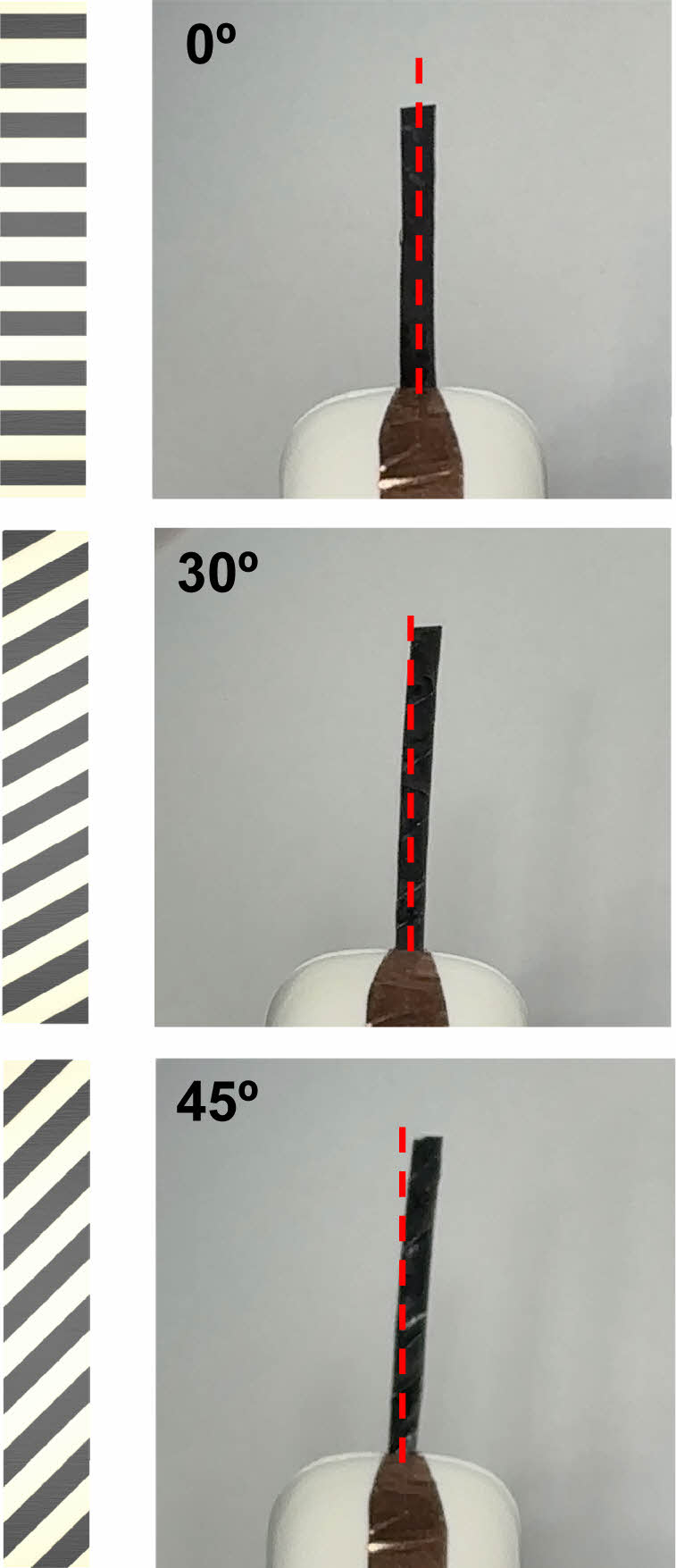
Fig. 8은 추가적으로 NdFeB-PDMS 스트립의 배향 각도를 조절하여 굽힘 방향을 프로그래밍하는 개념을 제시하고 구현하였다. 왼쪽의 모식도들은 0°, 30°, 45°로 NdFeB-PDMS 스트립을 배향한 복합막의 패턴을 나타내고 있으며, 오른쪽은 소프트 액추에이터가 구동할 때의 사진을 촬영하여 제시하고 있다. NdFeB-PDMS 스트립이 0°로 배향되어 있는 소프트 액추에이터는 순수한 out-of-plane 굽힘을 보이나, 배향 각도가 커질수록 비틀림 거동을 하는 것을 확인할 수 있다. 특히 NdFeB-PDMS 스트립이 45°로 배향되어 있을 때는 중심선 기준으로 유의미한 측방향 편차가 나타남을 확인하였다. 즉, NdFeB-PDMS 스트립 각도를 설계 변수로 사용하면 2자유도 혹은 3자유도 복합 모션도 구현 가능하다는 가능성을 시사한다. 따라서 NdFeB-PDMS 스트립 배향은 재료 조성이나 자속 밀도 세기 변경 없이도 복합막 액추에이터의 공간 운동 경로를 손쉽게 설계할 수 있는 유효 파라미터로 작용한다.
|
Fig. 5 (a) Bending and (b) peak-to-peak displacement of soft actuators under sinusoidal electrical stimulation |
|
Fig. 6 (a) Experimental setup used to measure magnetic flux density, (b) magnetic flux density of a used permanent Neodymium magnet |
|
Fig. 7 Demonstration of dual-responsive actuation |
|
Fig. 8 Bending direction via NdFeB-PDMS strip orientation |
본 논문은 NdFeB-PDMS 복합재 스트립을 레이저 패터닝하고 Nafion-이온성 액체 고분자에 매립함으로써, 전기(±1 V 이하)와 자기(~30 mT) 양 자극에 모두 민감하게 응답하는 소프트 액추에이터를 제안하였다. 스트립 피치가 넓을수록(3 mm) peak-to-peak 변위가 최대 1.60 mm로 증가하였고, 스트립 배향각 조절을 통해 굽힘-비틀림 복합 모션이 가능함을 확인하였다. 영구자석 단독 자극 시 약 2 mm의 즉각적 굽힘이 유발되었으며, 전기 자극을 연속적으로 인가하여 변위를 신속히 반전시킴으로써 독립적·협동적 제어의 실효성을 입증하였다. 이러한 결과는 낮은 분말 함량으로도 자기 토크를 국소 집중시킬 수 있는 스트립 패터닝 전략의 우수성을 보여 주었으며, 저전압·저자기장 구동, 다자유도 설계 용이성, 제작 공정의 단순성을 동시에 확보하였다. 향후 연구에서는 NdFeB-PDMS 스트립의 3차원 자화 방향 제어 및 다중 전극 패턴화를 통하여 더 복잡한 공간 변형과 고속 응답을 달성하고자 한다. 본 연구에서 제안한 NdFeB-PDMS 복합재가 패턴된 이온성 고분자 기반 전기-자기 응답형 소프트 액추에이터는 생체 모사 로봇, 능동 광학 소자, 웨어러블 촉각 피드백 시스템 등 다양한 응용 분야에서 경량·저전력·정밀 구동 솔루션으로 활용될 것으로 기대된다.
이 연구는 국립금오공과대학교 학술연구비로 지원되었음(2024-2026).
- 1. Jo, C., Pugal, D., Oh, I.K., Kim, K.J., and Asaka, K., “Recent Advances in Ionic Polymer-Metal Composite Actuators and Their Modeling and Applications,” Progress in Polymer Science, Vol. 38, No. 7, 2013, pp. 1037-1066.
-

- 2. Jo, S.J., Kim, G.M., and Kim, J., “Recent Advances in Electric Stimuls-Responsive Soft Actuators,” Composites Research, Vol. 37, No. 4, 2024, pp. 247-264.
-
- 3. Lu, C., Chen, W., and Zhang, X., “Highly Efficient Ionic Actuators Enabled by Sliding Ring Molecule Actuation,” Nature Communications, Vol. 16, 2025, pp. 2480.
-
- 4. Kim, J., “High-Performance Soft Ionic Biopolymer Actuators Based on Sulfonated Chitosan-coated Electrospun Silk Membrane with Graphene Electrodes,” Advanced Composite Materials, Vol. 33, No. 1, 2024, pp. 105-119.
-
- 5. Li, H., “Ti3C2Tx MXene Based Electro-Ionic Soft Actuator with Potential for Wearable Finger Straps,” ACS Omega, Vol. 9, No. 42, 2024, pp. 42814-42821.
-
- 6. Liu, C., and Yoshio, M., “Ionic Liquid Crystal-Polymer Composite Electromechanical Actuators: Design of Two-Dimensional Molecular Assemblies for Efficient Ion Transport and Effect of Electrodes on Actuator Performance,” ACS Applied Materials & Interfaces, Vol. 16, No. 21, 2024, pp. 27750-27760.
-
- 7. Mahato, M., Hwang, W.J., Tabassian, R., Oh, S., Nguyen, V.H., Nam, S., Kim, J.S., Yoo, H., Taseer, A.K., Lee, M.J., Zhang, H., Song, T.E., and Oh, I.K., “A Dual-Responsive Magnetoactive and Electro-Ionic Soft Actuator Derived from a Nickel-Based Metal-Organic Framework,” Advanced Materials, Vol. 34, No. 35, 2022, pp. 2203613.
-
- 8. Shu, Q., Liao, G., Liu, S., Deng, H., Pang, H., Xu, Z., Gong, X., and Xuan, S., “An Electrothermal and Magnetic Dual-Modal Actuator toward Soft Self-Sensing Robots,” Advanced Materials Technologies, Vol. 8, No. 14, 2023, pp. 2300019.
-
- 9. Wu, H., Luo, R., Li, Z., Tian, Y., Yuan, J., Su, B., Zhou, K., Yan, C., and Shi, Y., “Additively Manufactured Flexible Liquid Metal-Coated Self-Powered Magnetoelectric Sensors with High Design Freedom,” Advanced Materials, Vol. 36, No. 34, 2024, pp. 2307546.
-
- 10. Dong, Z., Wang, Y., Wen, J., Li, F., Du, Q., Zhang, Y., and Zhao, X., “NdFeB/PDMS Flexible Electromagnetic Actuator with Vibration and Nonvibration Dual Modes Based on Three-Dimensional Coils,” ACS Applied Electronic Materials, Vol. 6, No. 1, 2024, pp. 310-318.
-
- 11. Wu, T., Wang, X., Cao, X., and Wang, N., “NdFeB-based Magnetic Triboelectric Nanogenerator for Enhanced Bioenergy Harvesting and Tactile Perception,” Nano Energy, Vol. 128, 2024, pp. 109883.
-
 This Article
This Article
-
2025; 38(3): 257-262
Published on Jun 30, 2025
- 10.7234/composres.2025.38.3.257
- Received on Jun 20, 2025
- Accepted on Jun 30, 2025
Services
Shared
Correspondence to
- Jaehwan Kim
-
School of Mechanical Engineering, Kumoh National Institute of Technology
- E-mail: kimjh8729@kumoh.ac.kr
Gangnam Mirae Tower, Suite 601, 174 Saimdang-ro, Seocho-gu, Seoul 06627, South Korea
Tel: +82-2-598-1550 Fax: +82-2-598-1557 E-mail: composites@kscm.re.kr