


- Triboelectric Smart Mats for Real-time Position Detection System
Namgyue Ki*# , Dohyeong Kim*# ,Seongmin Na*, Minh Quang Bui*, Dukhyun Choi*, **† , Sunhee Kim***† , Kyungwho Choi*†
* School of Mechanical Engineering, Sungkyunkwan University
** Department of Future Energy Engineering, Sungkyunkwan University
*** ICT Based Public Transportation Research Department, Korea Railroad Research Institute- 마찰대전 기반 스마트 매트를 이용한 실시간 위치감지 시스템
기남규*# · 김도형*# · 나성민* · 부이 민 꾸앙* · 최덕현*, **† · 김순희***† · 최경후*†
This article is an open access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/4.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
This paper proposes smart mats for real-time position detection systems using triboelectric nanogenerators (TENGs). TENGs convert mechanical energy from human activities, such as walking, into electrical energy without external power. The system detects footstep movements and generates signals to monitor patterns and distinguish pedestrian types. By interdigitated electrode (IDE) structures, the system reduces wiring complexity and enhances scalability, making it ideal for smart city infrastructure. The TENG-based sensors are low-cost, reliable, and easily maintained, adaptable to various surfaces, and applicable in public spaces, transportation hubs, and urban environments. This system has the potential to improve sustainable energy efficiency and crowd management.
본 연구에서는 마찰대전(TENG) 기반 스마트 매트를 이용한 실시간 위치 감지 시스템을 제안한다. 이 스마트 매트는 외부 전원 없이 인간의 보행에너지를 전기에너지로 변환하며, 이를 통해 발걸음의 움직임을 감지하고 신호를 생성하여 보행 패턴을 모니터링하고 보행자 유형을 구분한다. 교차 전극(IDE) 구조를 활용하여 배선 복잡성을 줄이고 확장성을 향상시켜 스마트 시티 인프라에 적합하다. 마찰대전 센서는 저비용, 신뢰성, 용이한 유지보수 특성을 갖추고 있으며, 다양한 표면에 적용 가능해 공공 공간, 교통 허브 및 도시 환경에서 유용하다. 이 시스템은 지속 가능한 에너지의 효율과 군중 관리를 향상시키는 잠재력이 있다.
Keywords: 센서(Sensor), 스마트 매트(Smart mat), 위치 감지(Position detection), 마찰대전(Triboelectric), 교차 전극(Interdigitated electrode)
1.1 배경 및 필요성
환경에서 에너지를 수확하는 기술은 지속 가능한 에너지 자원 개발에 중요한 역할을 하며, 기계적 에너지는 우리 생활 환경에서 가장 풍부한 에너지 형태 중 하나이다. 인간은 매일 수천 걸음을 걷고, 이 기계적 에너지는 마찰대전 발전기(triboelectric nanogenerator, TENG)를 통해 수확할 수 있다[1]. 센서 매트와 신발을 사용한 TENG에 대한 연구는 활발히 이루어지고 있으며, 이러한 시스템은 실내에서의 걷기와 같은 인간 활동을 통해 발생하는 기계적 에너지를 수확하거나 감지할 수 있다. 특히, 스마트 매트 시스템은 노인의 낙상 감지와 같은 용도로 활용될 수 있으며, 이를 통해 독거노인의 낙상 사고를 감지하고 즉각적인 대응이 가능하다. 또한, 최근 산업 현장, 보안 시스템, 실내 모니터링 및 사용자 인터랙션 분야에서 실시간 위치 감지 기술의 중요성이 커지고 있으며, 이러한 기술은 에너지 제어, 이용자 동선 분석, 비상 상황 대응 등 다양한 목적으로 활용된다[2].
TENG는 접촉 대전 및 정전기 유도를 통해 기계적 에너지를 전기로 변환하는 혁신적인 기술로, 복합 전극 또는 단일 전극으로 설계할 수 있으며, 초경량 및 유연성 특성을 지닌다. 이러한 특성 덕분에 TENG 기반의 시스템은 저비용, 간단한 구조로 신뢰성과 다기능성을 갖추게 되어 스마트 바닥 시스템 개발에 매우 적합한 기술로 자리잡는다. 기존의 위치 감지 시스템은 영상 기반 CCTV 시스템 등에 의존하고 있지만, 이는 높은 설치 비용과 전력 소비, 오작동 시 유지보수의 어려움 등 한계가 있다. 특히, 실내 공간이나 대형 공공시설에서 사람의 위치와 움직임을 정밀하게 감지하고 스마트 인프라와 연계하기 위해서는 저비용으로 확장 가능한 위치 감지 시스템이 필수적이다[3-10].
본 연구에서는 TENG를 기반으로 한 스마트 매트 시스템을 제안하였으며, 이 시스템은 에너지 수확, 실시간 위치 감지, 보안 모니터링 등 다양한 기능을 동시에 수행할 수 있는 가능성을 보여준다. 기존의 위치 감지 센서 시스템은 많은 배선이 필요해 설치와 유지보수가 어려운 문제를 겪고 있으나, 본 시스템은 행과 열 전극의 교차점을 활용하여 배선 수를 획기적으로 줄일 수 있다. 이를 통해 보행자의 위치, 보폭, 발 면적 등의 정보를 추출하며, 지팡이나 휠체어 등 특수 보행자 구별 및 CCTV 사각지대에서의 사고 감지 등 다양한 응용이 가능해져 스마트 시티 환경에서 중요한 역할을 하게 된다. TENG 기반의 센서는 별도의 전원 공급 없이 동작할 수 있어 설치 및 유지보수가 용이하며, 다양한 표면 형태에 적용 가능해 도심 내 공공시설, 교통 허브, 스마트 시티 등에서 매우 유용하게 사용될 수 있다[11-14].
1.2 마찰대전의 기본 원리
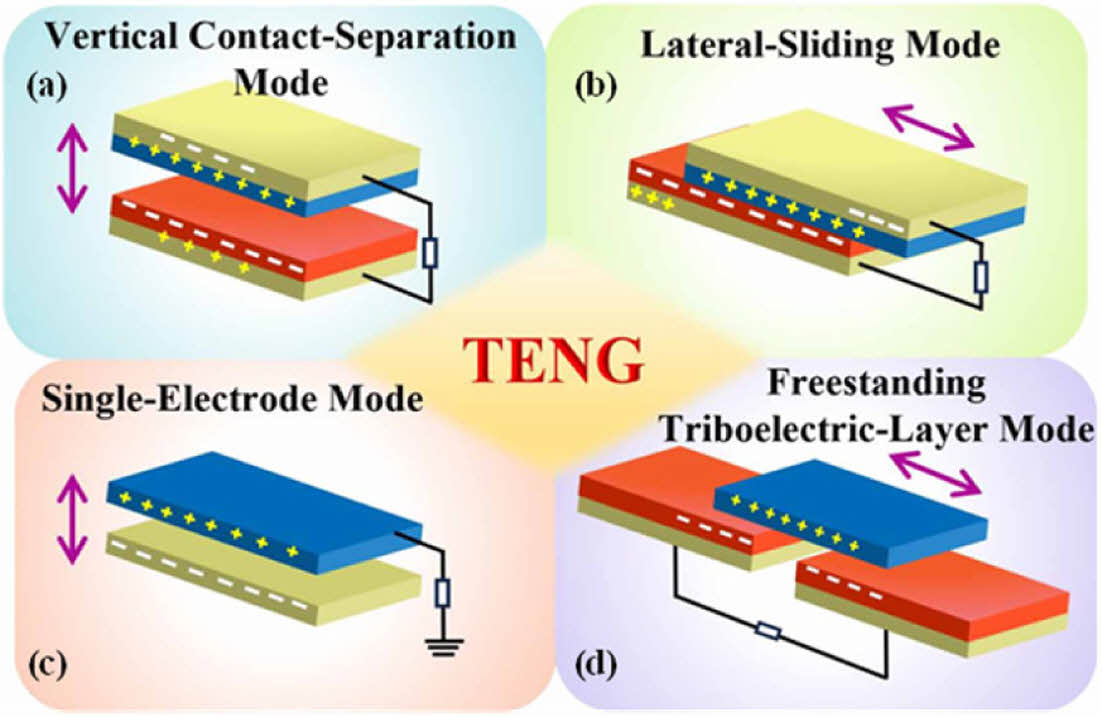
마찰전기 발전(TENG)의 작동 모드는 Fig. 1과 같이 크게 네 가지로 분류될 수 있다. 첫째, (a) vertical contact-separation (CS) mode는 양극과 음극이 수직으로 왕복 운동을 하며 두 물질 간 전위차가 발생하는 방식이다. 둘째, (b) lateral-sliding (LS) mode는 접촉된 두 물질이 서로 미끄러지며 전위차를 발생시키는 방식이다. 세 번째로, (c) single-electrode (SE) mode는 vertical contact-separation 모드와 유사한 움직임을 보이지만, 양 전극이 아닌 한 전극과 접지 사이에서 전위차를 이용한다. 마지막으로, (d) free-standing (FS) triboelectric-layer mode는 자유롭게 움직이는 물질에 의해 발생하는 전위차를 이용하는 방식이다. 각 모드는 외력의 크기와 종류에 따라 선택할 수 있으며, 이는 에너지 하베스팅의 효율을 높이거나 센서의 정확도를 향상시키는 데 중요한 역할을 한다[15].
본 연구에서는 스마트 매트 시스템의 센서가 이용객이 지나가는 통로의 바닥 면에 위치한다. CS는 두 물질의 접촉-분리를 위한 이격이 필수적이기 때문에 이용객에게 불편함을 초래하고, 센서의 내구성 문제 등 여러 가지 단점이 발생할 것으로 예상된다. 또한, LS와 FS는 효과적인 신호를 측정하기 어렵기 때문에 본 연구에서는 적합하지 않다. 반면, SE는 이용객의 신발과 접촉하는 물질만 적절하게 선정하면 신호를 효과적으로 측정할 수 있어, 본 연구의 마찰전기 발전 방식으로 선정되었다.
TENG은 서로 다른 대전열(triboelectric series)을 가진 두 물질이 접촉, 분리, 마찰, 또는 상대적으로 움직일 때 발생하는 전하의 이동을 전력으로 변환하는 친환경적인 에너지 하베스팅 기술이다. 이 기술은 대전열이 서로 다른 물질 간에 신호가 발생한다는 특성을 이용하여 최근 많은 연구가 센서 분야에서 활발히 이루어지고 있다.
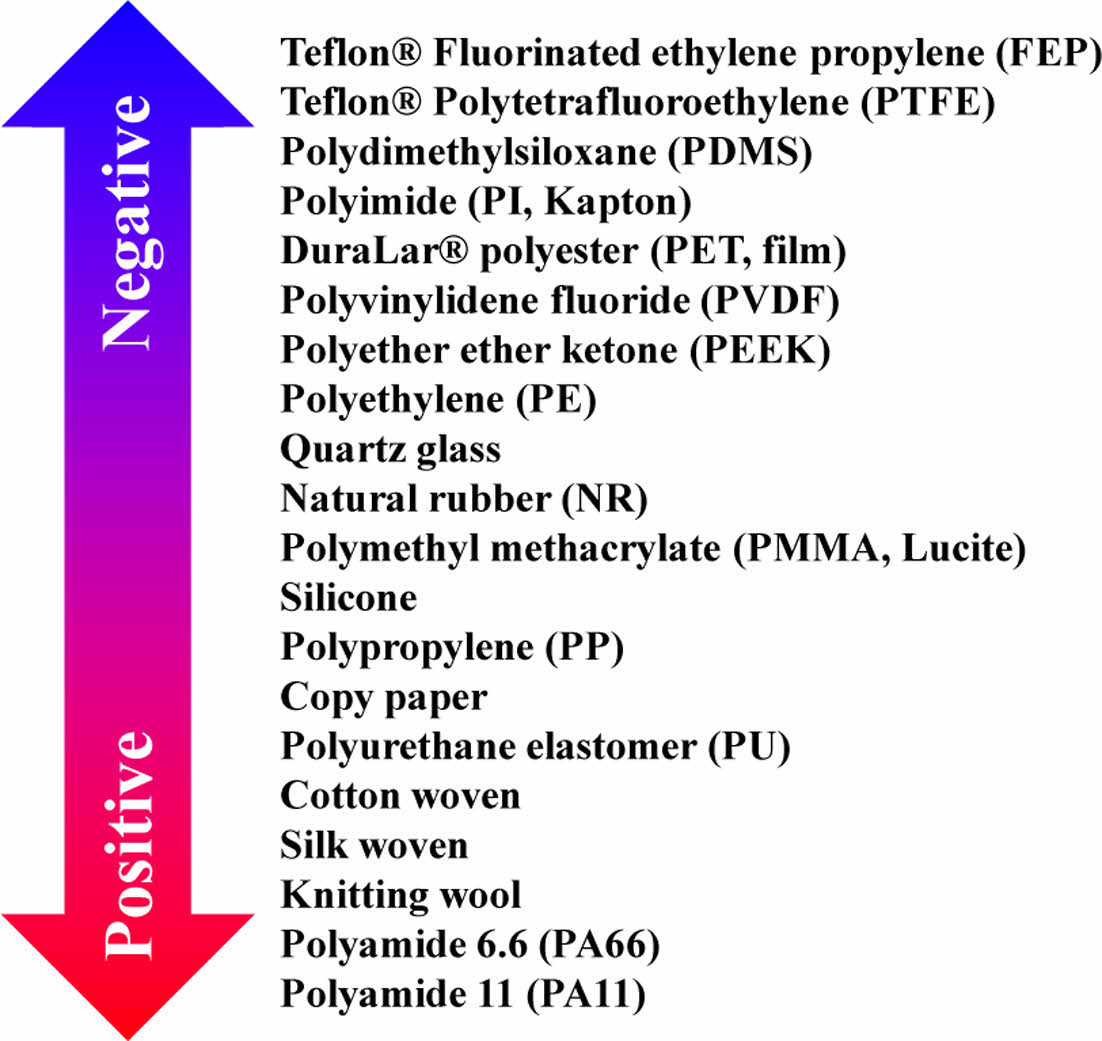
불소화 에틸렌 프로필렌(FEP)은 Fig. 2에서 보듯이 마찰대전 물질 중 전자 친화도가 가장 높은 물질로, 뛰어난 음극 성질을 지닌다[2]. 이는 FEP 내 풍부한 불소 원소가 매우 높은 전기음성도를 가지기 때문이다. 또한, FEP는 높은 내화성, 내부식성, 내열성, 내후성 등 우수한 내구성을 자랑하며, 이러한 특성 덕분에 많은 사람이 밟고 지나가는 바닥재에 적합한 음극 절연체로 활용될 수 있다. 본 연구에서는 이러한 특성을 고려하여 FEP 필름을 사용하였다.
|
Fig. 1 Illustration of four working modes of TENGs [15] |
|
Fig. 2 The triboelectric series for common materials divided from the most negative tribopolarity to the most positive [16] |
2.1 스마트 매트의 작동원리
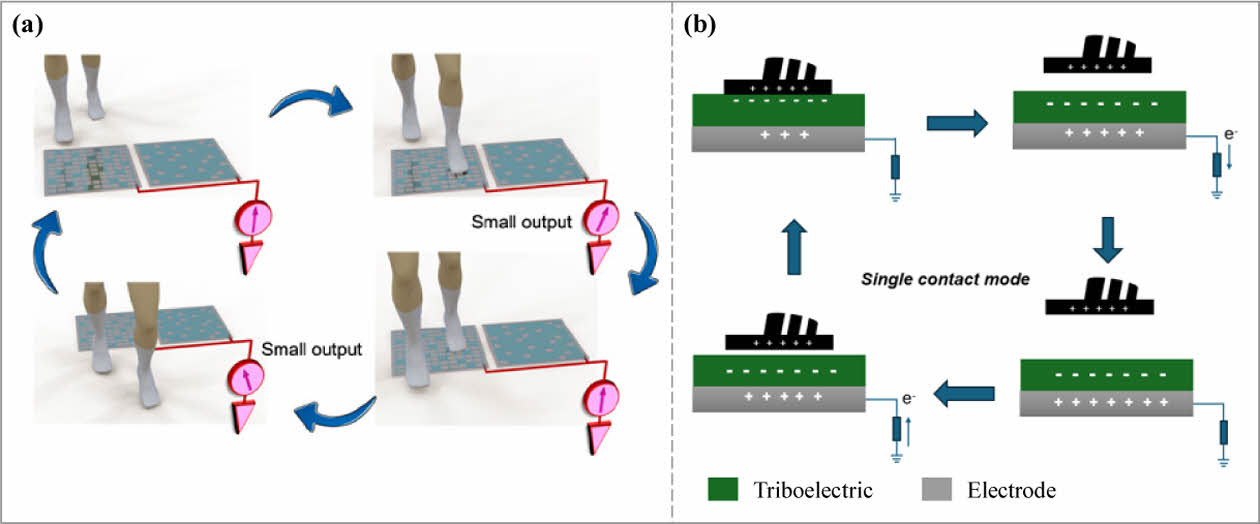
본 연구에서는 보행자들의 신발, 지팡이, 휠체어 바퀴 등에 사용되는 고무가 대전열 상 양극에 위치한다는 점을 고려하여, 보행자가 지나가는 바닥재에 음극을 부착하여 마찰전기를 생성하고 신호를 수집하는 방법을 제안한다. 신발 하부가 음극 절연체인 FEP와 접촉하면 신발은 양전하로 대전된다. 이때, 신발이 바닥에서 멀어지면 FEP 필름의 음전하는 그대로 유지되지만, 전극에 모인 양전하는 상대적으로 적어지게 된다. 결과적으로, 전하량이 0이 되도록 보상전하가 외부로 방출된다. 이후, 신발이 다시 가까워지면 전극은 외부로부터 전자를 받아들여 총 전하량을 다시 0으로 유지한다. 이 과정에서 전극과 접지 사이에 전류와 전위차가 발생하며, 이를 통해 생성된 신호는 센서로 활용될 수 있다(Fig. 3)[15-18].
2.2 스마트 매트의 구조
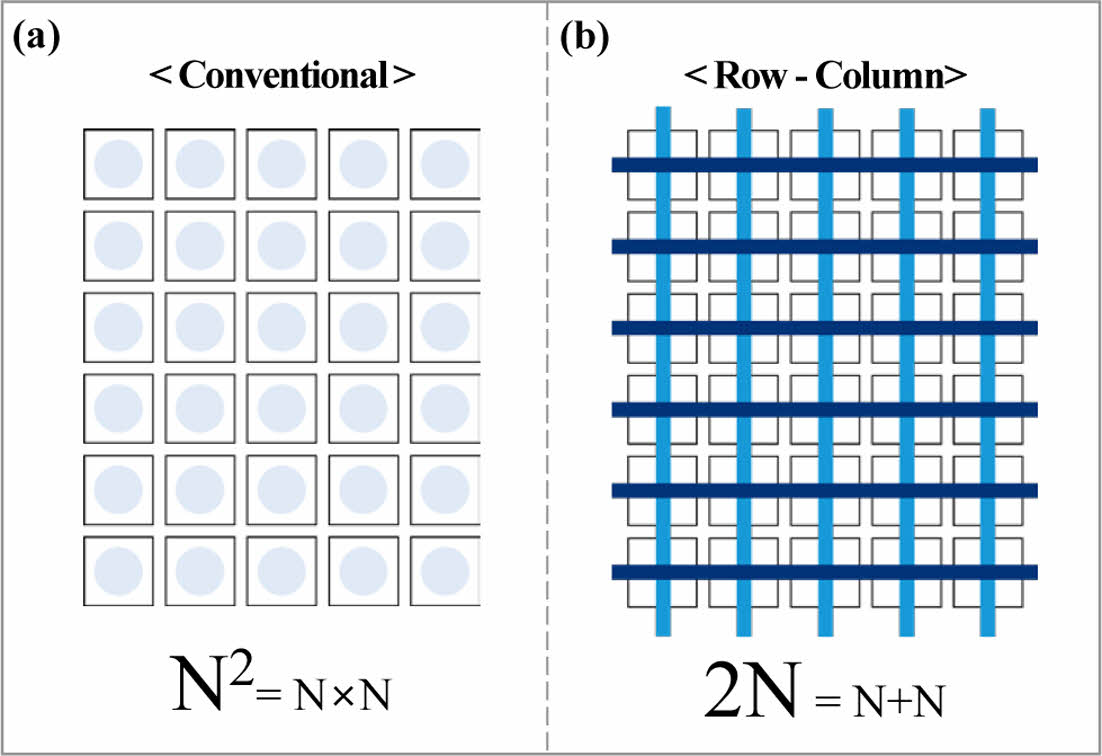
종래의 센서 시스템은 N × N 격자 구조에서 각 교차점마다 점(point) 센서를 배치하는 point matrix 방식으로 구성되며, 교차점과 센서 간 1:1 대응을 통해 높은 해상도를 제공한다. 그러나 이러한 시스템은 총 센서 수가 N2개에 달해 많은 센서가 필요하고, 이에 따라 비용, 배선 및 전력 소모 문제를 야기한다(Fig. 4a).
이를 개선하기 위해, 특정 위치를 감지할 때 행(row) 센서 N개와 열(column) 센서 N개가 교차하는 좌표로 인식하는 line matrix 방식을 제안하고 선(line) 센서를 배치한다. 이 방식에서는 총 센서 수가 2N개로, 기존 방식에 비해 센서 수를 크게 줄일 수 있다. 특히 N이 커질수록 절감 효과는 더욱 두드러지며, 비용과 배선, 전력 소모 측면에서 효율적인 개선이 가능하다(Fig. 4b).
선(line) 센서 방식은 기본적으로 유전체층 1개(마찰대전층)와 전극층 2개를 적층하여 구성된 3층 구조를 가진다(Fig. 5). 그러나 이 구조에서는 터치에 의한 변형이 발생할 경우, 격자 간 간격이 불균일해져 위치 감지 해상도가 저하되는 문제가 발생한다[4]. 또한, 행(row) 전극과 열(column) 전극 간의 접촉이 발생할 수 있어, 접촉 신호의 왜곡과 노이즈 문제가 발생할 가능성이 있다. 이러한 문제를 해결하기 위해, 전극 간의 물리적인 분리가 필요하다.
본 연구에서는 이러한 문제들을 모두 해결하면서, 외부 전원에 의존하지 않는 위치 감지 스마트 매트를 개발하였다. 이 매트는 FEP 필름 마찰대전층 1개와 카본 양면 테이프 전극층 1개를 적층한 2층 구조로 구성되어 있다. 전극 간의 직접적인 접촉을 회피하기 위해 분절점이 설계되었으며, 아크릴 절연체 기판 아래에 분절점마다 전극 조각을 연결하여 신호의 왜곡을 방지하였다.
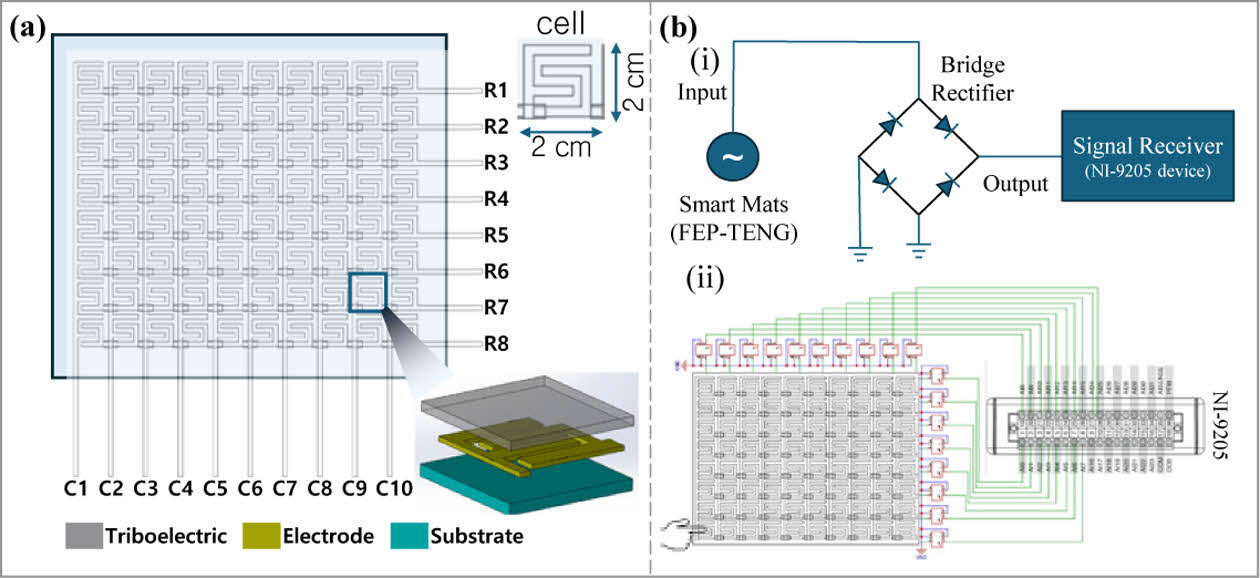
또한, 집적도를 높이기 위해 전극을 교차 전극(interdigitated electrode, IDE) 구조로 배열하였다(Fig. 6a). 행 전극과 열 전극의 교차 배열을 위해 레이저 조각기(CORYART, C40)를 사용하여 전극 패턴을 제작하였고, 셀(cell)의 크기는 2 × 2cm2 이다. 전극 패턴은 CAD 프로그램으로 설계되었으며, 장비 소프트웨어를 이용해 효율적으로 대면적 전극 패턴을 제작하였다. 이 방식은 전극 패턴을 빠르게 제작할 수 있을 뿐만 아니라, 넓은 감지 면적을 제공하는 장점이 있다.
|
Fig. 3 Working mechanism of (a) the smart mats when a person walks on/off [17]; (b) the triboelectric sensors with single contact mode |
|
Fig. 4 (a) conventional dotted sensors; and (b) row-column line sensors in the space of N x N matrices |
|
Fig. 5 Conventional three-layer structure of TENG position detection sensor [18] |
|
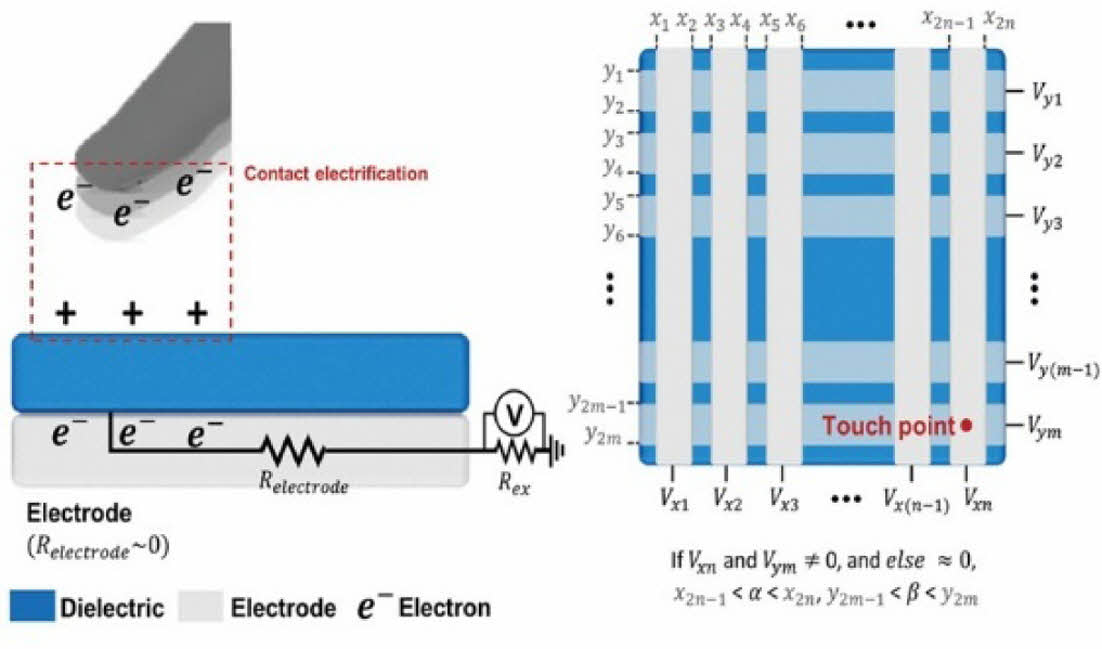
Fig. 6 (a) Top view of interdigitated electrode (IDE) structure to maximize the interaction area and the sensitivity of the sensor at each point; (b) The touch signals of smart mats are AC signals, which are converted into DC signals through bridge rectifier circuits and transmitted to the signal receiving device. (bi) schematic illustration and (bii) a circuit diagram of the smart mat system |
스마트 매트(FEP-TENG)에서 발생한 교류 신호는 접촉에 의해 생성되며, 이 신호는 브릿지 정류회로를 통해 직류 신호로 변환된다. 변환된 직류 신호는 다채널 데이터 수집 장치(National Instrument, NI-9205)에 의해 수신되며, 이후 NIMAX 프로그램을 이용하여 시각화된다(Fig. 6b).
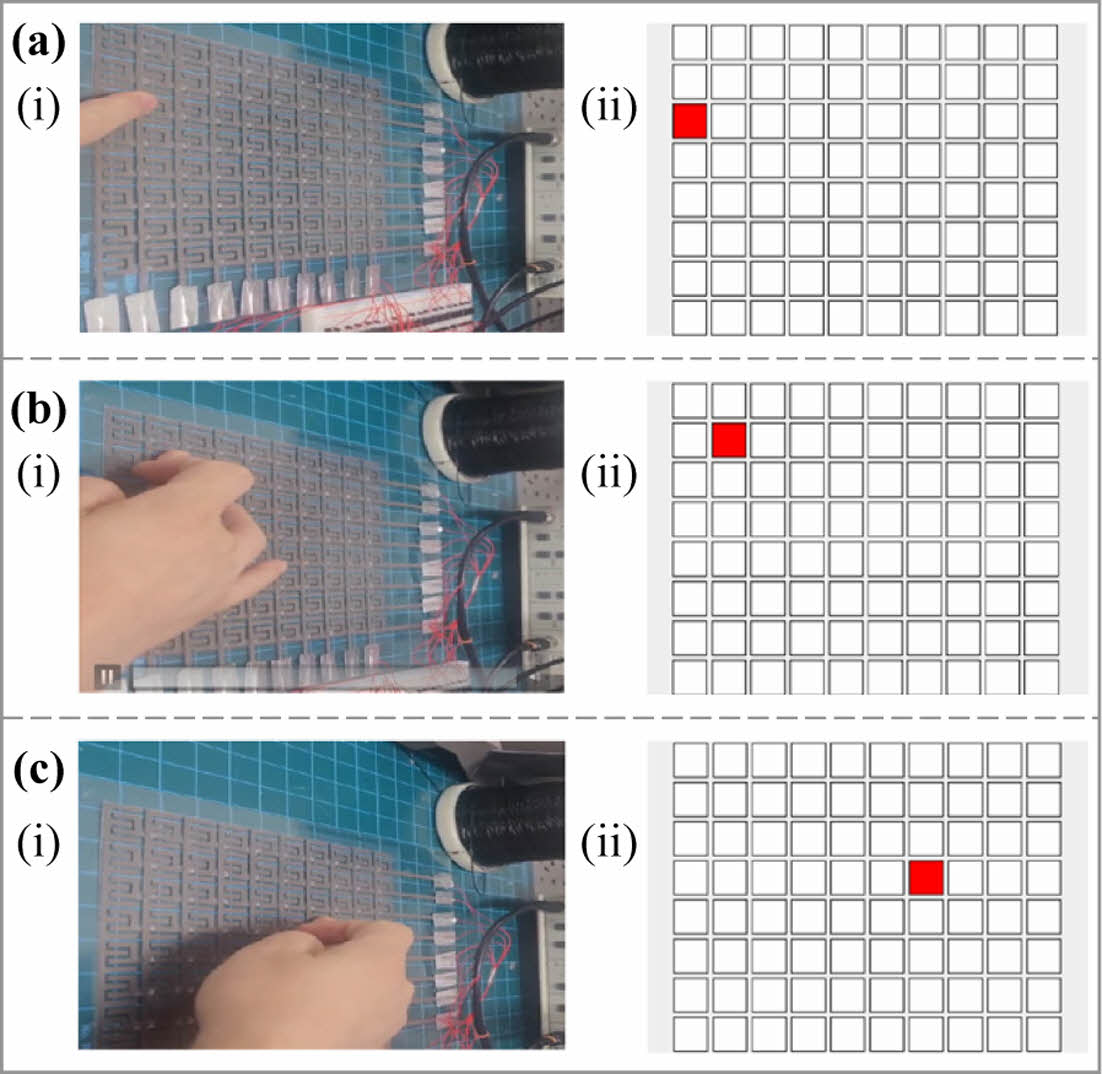
행 전극과 열 전극에서 발생하는 신호는 동시에 측정되며, 센서는 노이즈 제거를 위해 사전에 설정된 기준값(threshold) 이상의 전압만을 유효 입력으로 인식하여 행렬을 구성한다. 이러한 행렬을 시각화함으로써 실시간 위치 감지 시스템이 구현된다. Fig. 7은 센서의 임의의 위치를 손으로 접촉했을 때 해당 위치를 실시간으로 감지하는 과정을 보여준다. 또한 센서의 해상도가 높을수록 더 작은 기준값을 적용할 수 있어 민감도가 향상되며, 이를 통해 감지 대상을 성인에서 유아, 나아가 반려동물까지 점진적으로 확장할 수 있다. 이러한 연구 전략은 가벼운 보행자 감지 문제를 효과적으로 해결하는 데 기여할 수 있다.
이러한 매트릭스 기반 센서 구조에서는 동시 입력 시 실제 없는 위치에 입력이 감지되는 고스트 현상(ghosting phenomenon)이 발생할 수 있다. 이는 정확도 저하를 초래하며, 하드웨어 설계 및 소프트웨어 알고리즘으로 개선 가능하다. 본 연구진은 이에 대한 후속 연구를 진행 중이다.
측정 전압은 일반적으로 접촉-분리의 간격, 속도, 가속도, 하중 조건에 따라 달라지지만, 재료에 따른 신호 특성을 연구하기 위해 본 연구에서는 동일한 측정 조건에서 상대 전극의 재료만 교체하여 실험을 진행하였다.
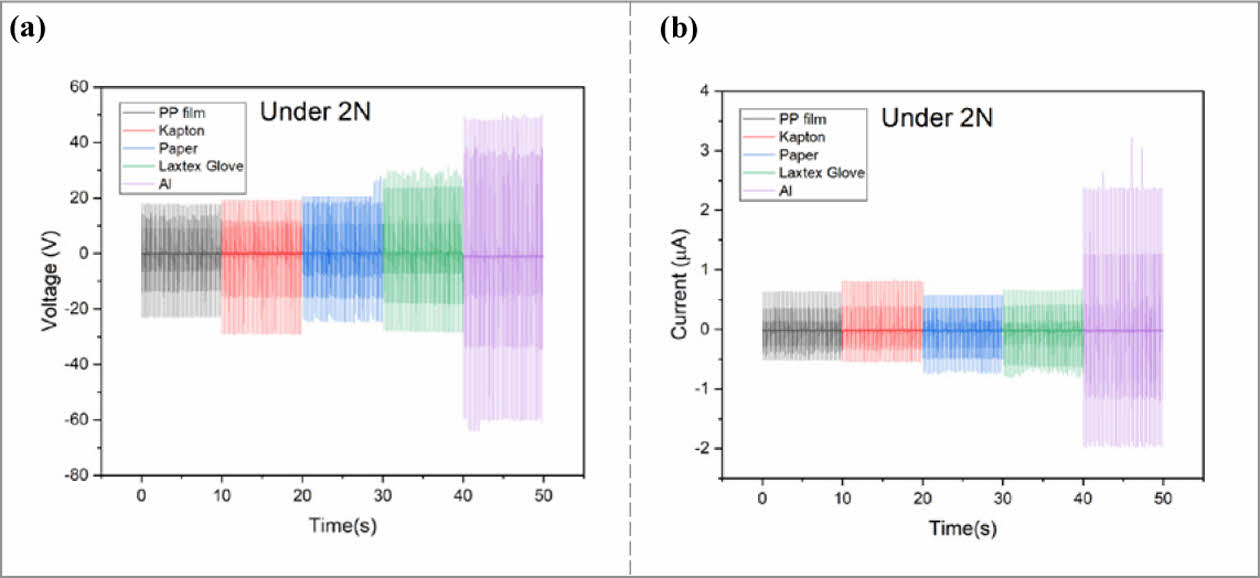
실험에는 푸싱테스터(JUNIL TECH, JIPT-110)와 오실로스코프(Tektronix, MDO3052)를 사용하여 재료에 따른 전극의 신호를 측정하였다. FEP 필름을 카본 테이프 전극에 부착하여 FEP-TENG 시료를 제작한 후, 시료의 신호 특성을 파악하기 위해 폴리프로필렌(PP) 필름, 폴리이미드(Kapton), 종이, 라텍스 장갑, 알루미늄을 상대 전극으로 설정하여 실험을 진행하였다.
실험 결과, Fig. 8을 보듯이 스마트 매트는 다양한 재료와의 접촉을 효과적으로 감지할 수 있음을 확인하였다. 접촉 재료에 따라 신호 특성이 상이하게 나타났으며, (a) 전압과 (b) 전류를 동시에 고려하여 신호를 처리할 경우 서로 다른 물질을 구분할 수 있다는 점을 알 수 있었다.
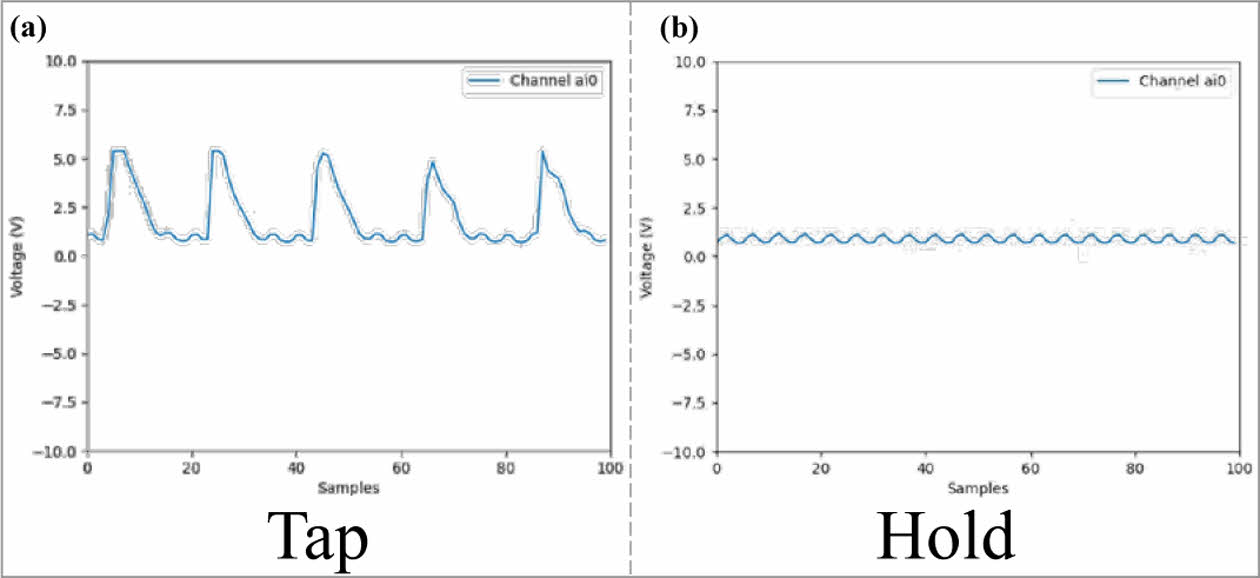
이러한 특성은 보행자의 유형을 판별하고 유동 인구의 혼잡도를 계측하는 데 활용될 수 있으며, 나아가 스마트 시티 인프라 기술로의 실제 적용 가능성을 보여준다. 이때 설치 환경에서 발생하는 노이즈에 대응하기 위해 센서는 탭(tap) 신호와 홀드(hold) 신호를 구분하여 장애물을 보행자와 명확히 구별할 수 있고(Fig. 9), 눈·비·바람·먼지 등 외부 요인에 대해서도 재료별 접촉 신호 특성의 차이를 활용하여 판별이 가능하다. 더불어 환경 데이터가 축적될수록 정교한 필터링 기법을 적용할 수 있어 감지 정확도를 지속적으로 향상시킬 수 있다.
|
Fig. 7 The row-column line sensors (2N) achieve precise localization of any singular contact point. (i) Actual touch points and (ii) displayed output points for (a) (R3,C1), (b) (R2,C2), and (c) (R4,C7) |
|
Fig. 8 10-second graphs of (a) voltage; and (b) current by touch with different materials |
|
Fig. 9 Measurement graphs of (a) tap; and (b) hold voltage signals by fingers |
본 연구에서는 실시간 위치 감지 시스템에 대한 스마트 매트 기술을 제안하였다. 기존의 차동 아날로그 입력 방식이 전극과 접지 사이의 전압을 측정하는 방식에는 부적합한 점을 해결하기 위해, 단일 종단 아날로그 입력 방식을 채택하여 장비의 접지를 참조 전압으로 설정하고 센서의 전압을 정확히 측정할 수 있었다.
본 시스템은 스마트 시티 인프라 기술로 활용될 수 있으며, 예를 들어 출퇴근 시간의 병목 현상을 해소하고, CCTV 사각지대에 설치하여 안전사고 예방 및 관리에 기여할 수 있다. 또한, 이용객의 보폭, 발의 면적, 몸무게 등 정보를 수집하여 데이터베이스를 구축하며, 지팡이나 휠체어와 같은 특수한 신호와 데이터를 수집함으로써 사회적 약자를 위한 교통 정책 수립에 중요한 기초 자료를 제공할 수 있다. 이를 통해, 본 연구에서 제안한 시스템은 스마트 시티와 관련된 다양한 분야에서 중요한 역할을 할 수 있을 것으로 기대된다.
본 연구는 2025년도 산업통상자원부 및 산업기술평가관리원(KEIT) (20013794), 한국철도기술연구원 기본사업 (PK2503D2) 및 한국연구재단(NRF)의 지원을 받아 수행되었습니다(MSIT) (RS-2025-02214162). 지원에 대해 진심으로 감사드립니다.
- 1. Kuntharin, S., Harnchana, V., Sintusiri, J., Thongbai, P., Klamchuen, A., Sinthiptharakoon, K., ... and Chindaprasirt, P., “Smart triboelectric floor based on calcium silicate-carbon composite for energy harvesting and motion sensing applications.” Sensors and Actuators A: Physical, Vol. 358, 2023, 114423.
-

- 2. He, C., Zhu, W., Chen, B., Xu, L., Jiang, T., Han, C. B., ... and Wang, Z. L., “Smart floor with integrated triboelectric nanogenerator as energy harvester and motion sensor.” ACS Applied Materials & Interfaces, Vol. 9, No. 31, 2017, pp. 26126-26133.
-
- 3. Ma, J., Jie, Y., Bian, J., Li, T., Cao, X., and Wang, N., “From triboelectric nanogenerator to self-powered smart floor: a minimalist design,” Nano Energy, Vol. 39, 2017, pp. 192-199.
-
- 4. Wang, Z. L., “Self‐powered nanosensors and nanosystems,” Advanced Materials, Vol. 24, No. 2, 2012, pp. 280-285.
-
- 5. Cao, X., Jie, Y., Wang, N., and Wang, Z. L., “Triboelectric nanogenerators driven self‐powered electrochemical processes for energy and environmental science,” Advanced Energy Materials, Vol. 6, No. 23, 2016, 1600665.
-
- 6. Zhu, G., Peng, B., Chen, J., Jing, Q., and Wang, Z. L., “Triboelectric nanogenerators as a new energy technology: From fundamentals, devices, to applications,” Nano Energy, Vol. 14, 2015, pp. 126-138.
-
- 7. Wang, Z. L., “Triboelectric nanogenerators as new energy technology for self-powered systems and as active mechanical and chemical sensors,” ACS nano, Vol. 7, No. 11, 2013, pp. 9533-9557.
-
- 8. Wang, Z. L., “Triboelectric nanogenerators as new energy technology and self-powered sensors–Principles, problems and perspectives,” Faraday discussions, Vol. 176, 2014, pp. 447-458.
-
- 9. Wang, Z. L., Chen, J., and Lin, L. “Progress in triboelectric nanogenerators as a new energy technology and self-powered sensors,” Energy & Environmental Science, Vol. 8, No. 8, 2015, pp. 2250-2282.
-
- 10. Xi, Y., Wang, J., Zi, Y., Li, X., Han, C., Cao, X., ... and Wang, Z. “High efficient harvesting of underwater ultrasonic wave energy by triboelectric nanogenerator,” Nano Energy, Vol. 38, 2017, pp. 101-108.
-
- 11. Hao, S., Jiao, J., Chen, Y., Wang, Z. L., and Cao, X., “Natural wood-based triboelectric nanogenerator as self-powered sensing for smart homes and floors,” Nano Energy, Vol. 75, 2020, 104957.
-
- 12. Mappoli, S., Ghosh, K., and Pumera, M., “Multi-material 3D printed smart floor tiles with triboelectric energy generation and security monitoring,” Virtual and Physical Prototyping, Vol. 20, No. 1, 2025, e2457580.
-
- 13. Shi, X., Luo, J., Luo, J., Li, X., Han, K., Li, D., ... and Wang, Z. L., “Flexible wood-based triboelectric self-powered smart home system,” ACS nano, Vol. 16, No. 2, 2022, pp. 3341-3350.
-
- 14. Ding, Z.B., Choi, D.H., “Recent Advances on TENG-based Soft Robot Applications,” Composites Research, Vol. 35, No. 6, 2022, pp. 378-393.
-
- 15. Nguyen, M. P., Huynh, N. D., Luu, T. T., and Choi, D., “Recent progress towards smart transportation systems using triboelectric nanogenerators,” Journal of Physics: Energy, Vol. 6, No. 2, 2024, 022001.
-
- 16. Liu, Y., Mo, J., Fu, Q., Lu, Y., Zhang, N., Wang, S., and Nie, “Enhancement of triboelectric charge density by chemical functionalization,” Advanced Functional Materials, Vol. 30, No. 50, 2020, 2004714.
-
- 17. Shi, Q., Zhang, Z., He, T., Sun, Z., Wang, B., Feng, Y., ... and Lee, C., “Deep learning enabled smart mats as a scalable floor monitoring system,” Nature Communications, Vol. 11, No. 1, 2020, 4609.
-
- 18. Lee, Y., Lim, S., Song, W. J., Lee, S., Yoon, S. J., Park, J. M., ... and Sun, J. Y., “Triboresistive Touch Sensing: Grid‐Free Touch‐Point Recognition Based on Monolayered Ionic Power Generators,” Advanced Materials, Vol. 34, No. 19, 2022, 2108586.
-
 This Article
This Article
-
2025; 38(5): 569-574
Published on Oct 31, 2025
- 10.7234/composres.2025.38.5.569
- Received on Aug 21, 2025
- Revised on Sep 1, 2025
- Accepted on Sep 11, 2025
Services
Shared
Correspondence to
- Dukhyun Choi*, ** , Sunhee Kim*** , Kyungwho Choi*
-
* School of Mechanical Engineering, Sungkyunkwan University
** Department of Future Energy Engineering, Sungkyunkwan University
*** ICT Based Public Transportation Research Department, Korea Railroad Research Institute - E-mail: kw.choi@skku.edu, sunheekim@krri.re.kr, bred96@skk
Gangnam Mirae Tower, Suite 601, 174 Saimdang-ro, Seocho-gu, Seoul 06627, South Korea
Tel: +82-2-598-1550 Fax: +82-2-598-1557 E-mail: composites@kscm.re.kr